在城市建设中,管道建设越来越多,对焊接技术和效率要求不断增加。工作环境恶劣不说,很多时候,
人力很难达到作业要求,而管道焊接机器人的发明可以满足人们对管道焊接质量的要求,针对管道焊
接机器人使用得电缆,南游电缆厂在多年的与客户技术沟通上有很深的研究,针对管道机器人所使用
的电缆的具体要求都能得到满足。

管道自动焊接机器人是一种自动焊接设备,相对于人工焊接方式,可以大大提高焊接效率和焊接质量。
该机器人机械结构主要由焊枪姿态调整、焊枪位置调整、焊接小车行走驱动等几部分组成,由于焊接
小车是结构对称的,可以装一把焊枪,也可以装两把焊枪,故以其中一侧为例。焊枪姿态调整部分主
要完成干伸长调整,保证满足焊接工艺上对焊缝的要求,姿态调整机构由电机1带动滑板2来实现;
焊枪位置调整部分是在焊接过程中完成焊枪的摆宽、摆频、两侧位置的停留时间等的功能动作,摆动
部分由电机4带动滑板3来实现;行走驱动是实现焊枪沿管周运动的驱动力机构,在焊接时,焊接速度
即为焊车的行走速度,因此要求焊车行走机构行动十分平稳,行走机构由电机5驱动。管道焊接机器
人可以代替人工或半自动焊接,达到人力很难做到的作业质量,弥补了焊接技术上的缺陷,这项技术
对城市建设是非常重要的,如今焊接机器人还在不断地研发和改进,相信以后在作业技术方面会更加
完善,拭目以待吧。
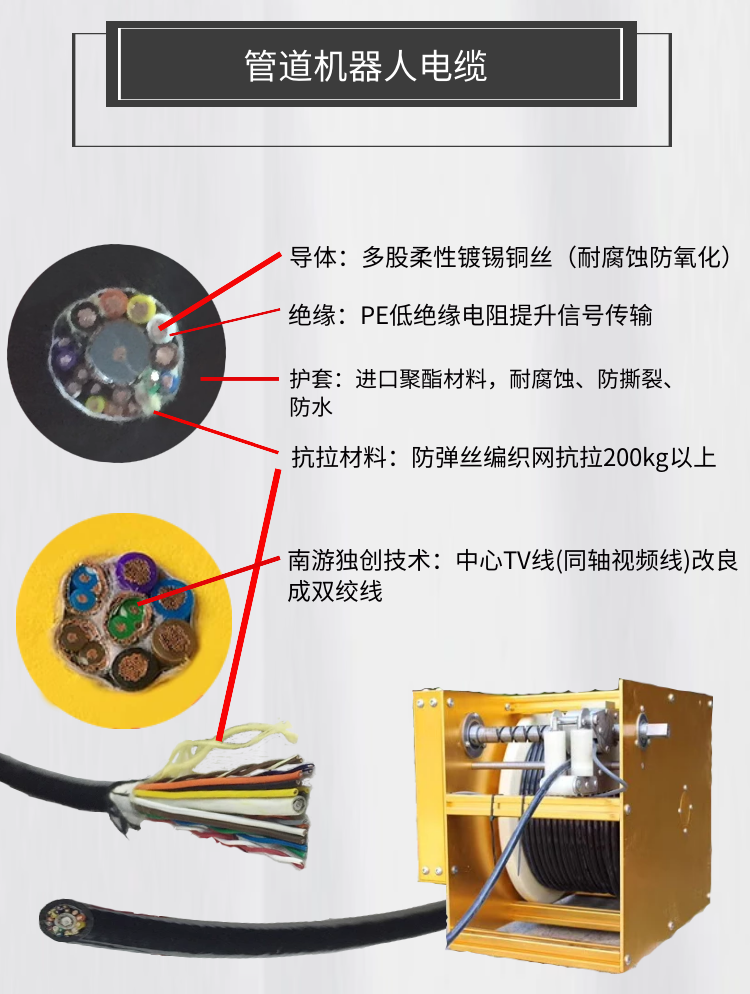
管道器人电缆规格
单根导体直径φ
外径/mm
控制信号线
视频信号线
电源线
地线
PI60
6×2×0.14
75-3
4×0.35
0.4
0.1
9.3
PI60
9×2×0.14
75-3
4×0.35
0.4
0.1
9.3
PI60
12×0.14
75-3
4×0.35
0.4
0.1
9.3
PI60
18×0.14
75-3
4×0.35
0.4
0.1
9.3
PI60
6×2×0.14
1×2×0.4
4×0.35
0.5
0.1
10
PI60
9×2×0.14
1×2×0.4
4×0.35
0.5
0.1
10
PI60
12×0.14
1×2×0.4
4×0.35
0.5
0.1
10
PI60
18×0.14
1×2×0.4
4×0.35
0.5
0.1
10



扫描二维码,关注我们